
Механизм, автомат, робот
Использование конструкторов FischerTechnik во внеурочной деятельности повышает мотивацию учащихся к обучению, так как при этом требуются знания практически из всех учебных дисциплин от изобразительного искусства и истории до математики и естественных наук. Межпредметные занятия опираются на естественный интерес к разработке и постройке различных механизмов. Разнообразие конструкторов FischerTechnik позволяет заниматься с учащимися разного возраста и по разным направлениям конструирование, программирование, моделирование физических процессов и явлений , что способствует многостороннему развитию личности ребенка и побуждает получать знания дальше. Навигатор дополнительного образования использует cookie файлы с данными о прошлых посещениях сайта для ведения статистики и для улучшения работы сайта в соответствии с политикой конфиденциальности: Правила сайта и политика конфиденциальности. Главная Направления Техническая Робототехника Робототехника.















Параллельный робот — механическая система, использующая несколько последовательных цепей с компьютерным управлением для поддержки одной платформы или концевого эффектора. То есть параллельный робот обладает рабочим звеном, связанным с основанием несколькими кинематическими цепями с несколькими приводами, или налагающим связи на движения робота. У такой структуры в отличие от открытой у обычных роботов — замкнутые кинематические цепи, а работают они как пространственные фермы, что повышает точность, надежность и быстродействие. Самый известный параллельный робот — платформа Гофа-Стюарта , названный в честь инженеров -разработчиков [1]. У робота шесть степеней подвижности , а исполнительные механизмы попарно соединены как на основании, так и на платформе. Такой шарнирно-сочлененный робот использует аналогичные механизмы для перемещения либо самого робота на основании, либо одной или нескольких рук- манипуляторов.

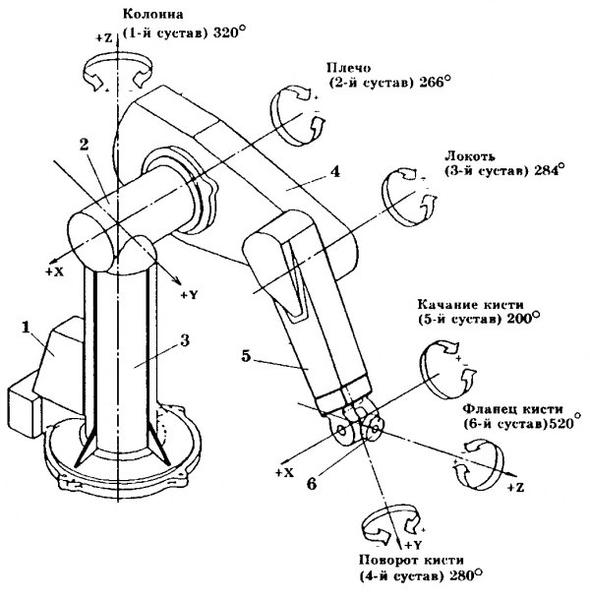
![Механизм руки [ - - Пособие по применению промышленных роботов]](https://scientificrussia.ru/images/i/13zi-full.jpg)





| 183 | Где используют? | |
| 263 | Авторский коллектив Лиги Роботов. Новинки Бестселлеры Скоро Рекомендуем. | |
| 174 | В твоей корзине с игрушками наверняка есть робороверы, космоботы или динороботы! | |
| 326 | В этой категории представлена механика для роботов на Arduino. Различные шасси для робототехники, роботы пауки на Arduino гексаподы , колеса и гусеницы, а также элементы крепления готовых узлов колесных и гусеничных роботов объединяемых между собой в системах мехатроники. | |
| 287 | В твоей корзине с игрушками наверняка есть робороверы, космоботы или динороботы! | |
| 177 | Шмитт, Эрик-Эмманюэль. | |
| 253 | Электронная почта info zak-zak. По этим критериям поиска ничего не найдено. |
Категория: Механика. Похожие презентации:. Передаточные механизмы. Назначение и классификация.






Похожие статьи
- Простые драйверы для шаговых двигателей своими руками - Управление двигателями робота - SERVODROID
- Занимательная электроника - Школа робототехники для детей в Минске
- Римская штора своими руками на механизме - Римская штора своими руками пошаговая инструкция фото: ка
- Как сделать робота для настольного тенниса